La entrada anterior fue hecha en Diciembre de 2023 pero al publicarla tan tarde, se juntó con esta entrada del mes de Febrero de 2024, donde tuve otro problema con la moto.


Láser e ingeniería electrónica
La entrada anterior fue hecha en Diciembre de 2023 pero al publicarla tan tarde, se juntó con esta entrada del mes de Febrero de 2024, donde tuve otro problema con la moto.
En esta entrada voy a publicar algunas fotos y pasos que seguí para reparar esta moto eléctrica, que tenía un fallo de controlador de motor.

En su web podéis ver los modelos y características: https://www.voltamotorbikes.com/
Continuar leyendo «Reparación moto eléctrica Volta Sport del año 2021»El Think city es un pequeño vehículo de 4 ruedas, propulsado por un motor eléctrico y la versión que adquirí, lleva la batería de sales fundidas Zebra. Dispone de una potencia de 34kW y la capacidad de la batería original era de unos 24kWh para una autonomía de 210Km.

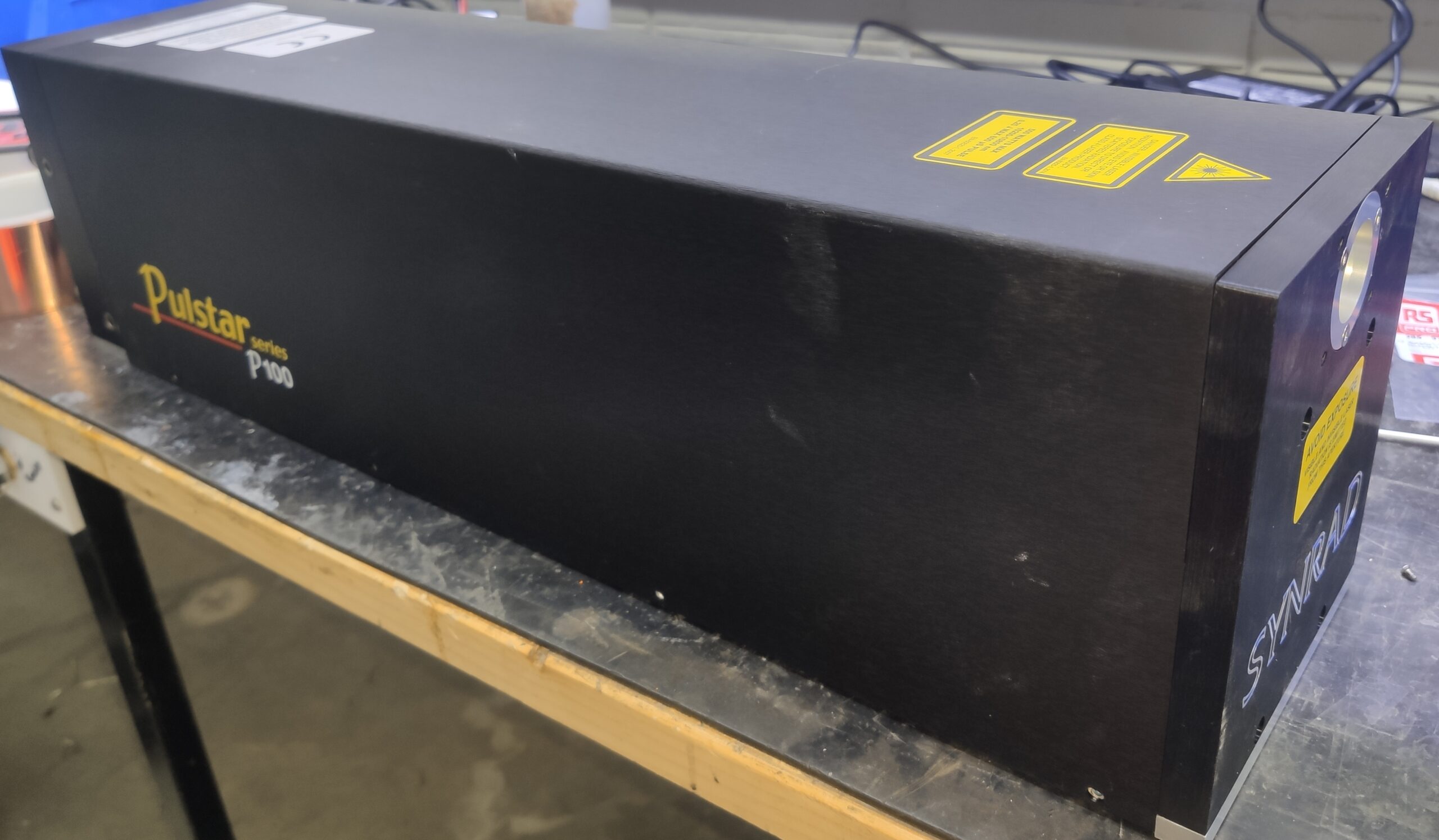
Refill laser synrad firestar F200

En esta ocasión os presento un despiece para recarga de un láser Synrad Firestar F200.
Continuar leyendo «Recarga láser Synrad Firestar F200»
Debido a algunos problemas con el dominio «bitacoradealfon.es», mi blog seguirá en bitacoradealfon.es , mientras estamos terminando la web de refill-laser.com
Naturalmente, en mi blog o bitácora seguiré mostrando despieces de equipos láser de CO2 de radiofrecuencia, además de reparaciones y recargas.
Aclaro también que la velocidad de actualización ha ido mermando a medida que nos estamos expandiendo, ya aceptamos equipos de cualquier parte del mundo.
Por este motivo solamente iré publicando equipos nuevos que no tenga documentados.
Refill iradion 1512F 100W
En esta ocasión realizamos la recarga de un tubo Iradion, modelo nuevo con pocos años.

Desde Vilamacolum, les deseamos un feliz año 2021.

Refill and repair laser synrad J48-2S
Realizamos muchas recargas de estos modelos, pero en esta ocasión es un equipo no muy antiguo del año 2012 y lleva una electrónica actualizada, mientras la cavidad y cuerpo siguen el mismo diseño de hace 20 años.
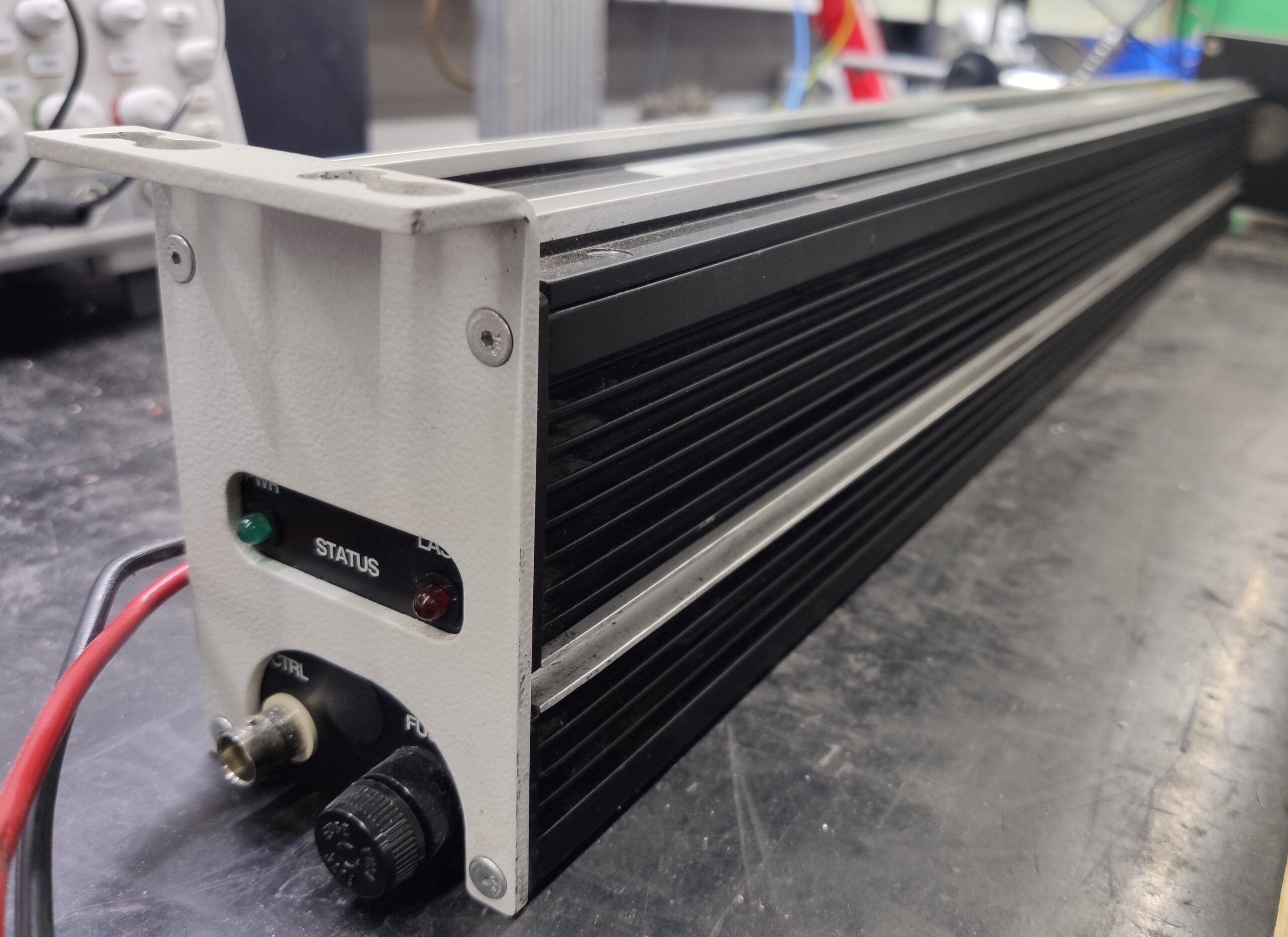
Continuar leyendo «Recarga láser CO2 Synrad J48-2S»En esta ocasión va a ser un despiece completo de un synrad V30.
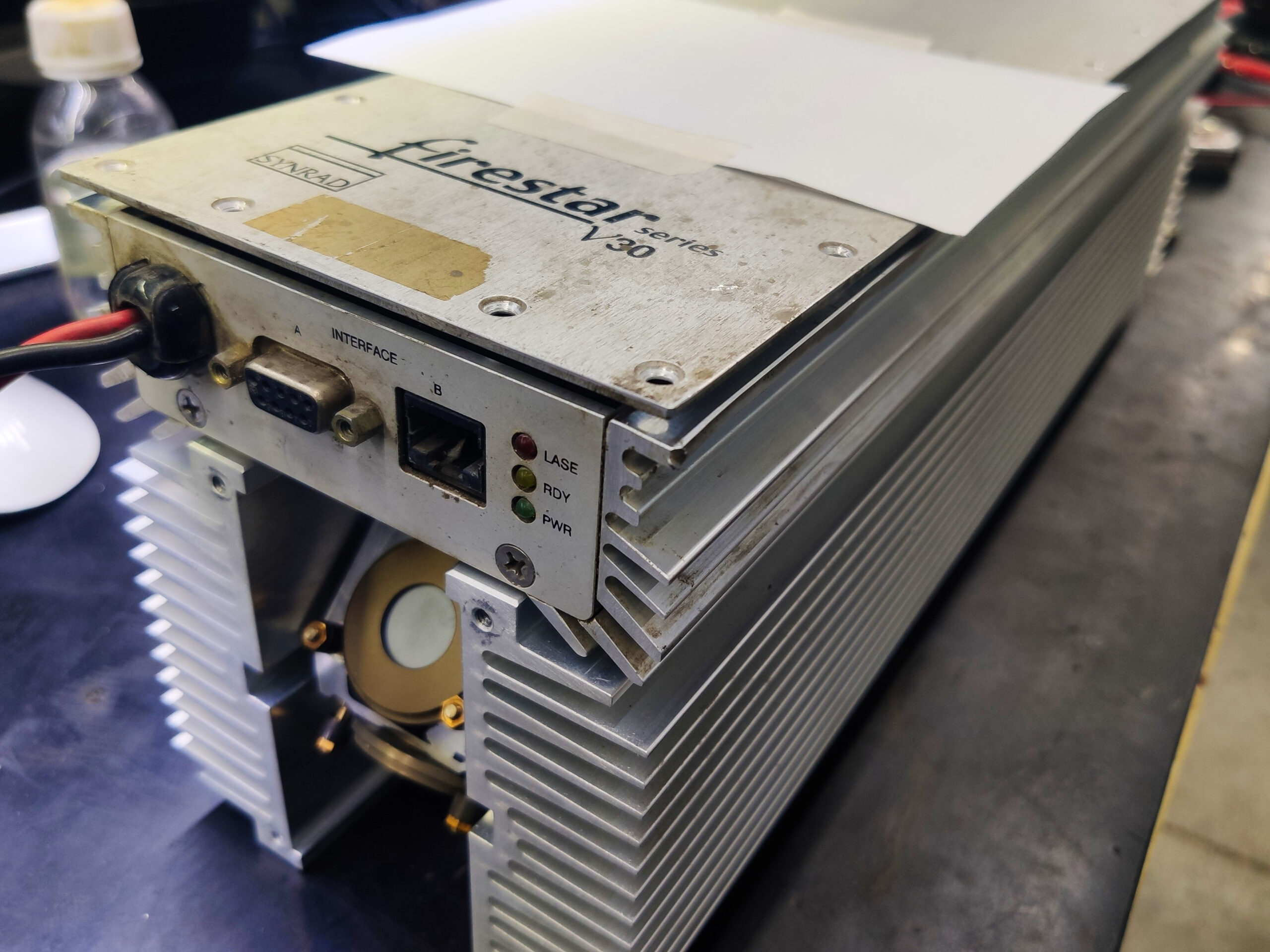
Estamos viendo algunos modelos V30 y V40 que han sido muy castigados, que una vez hecha la recarga nunca dan la potencia original, o se comportan de manera inestable.
En estos casos se descarta la reparación ya que implica ciertos componentes internos que van sellados y no hay forma de acceder a ellos sin romper la cavidad.
En esta entrada, mostraré la investigación en fotos para descubrir qué componentes son los que provocan este mal funcionamiento.
Continuar leyendo «Recarga y despiece láser Synrad V30»